线性规划和单纯形法
最后更新时间:
1.线性规划问题及数学模型
在线性约束条件下,寻找目标函数的最优化问题
一些概念
- CPF:corner-point feasible 角点可行解
- 可行解、非可行解
- 目标函数、约束函数
- 松弛变量(slack variables)
问题形式
一般形式
\[\begin{array}{c} \max (\min ) z=\sum_{j=1}^{\mathrm{n}} c_{\mathrm{j}} x_{j} \\ \text { s.t. }\left\{\begin{array}{l} \sum_{j=1}^{\mathrm{n}} \mathrm{a}_{\mathrm{ij}} \mathrm{x}_{\mathrm{j}} \leq(=, \geq) b_{i}(i=1,2, \ldots, m) \\ x_{\mathrm{j}} \geq 0 \qquad(j=1,2, \ldots, n) \end{array} \right. \end{array}\] ### 矩阵形式 \[\begin{array}{r} m \alpha x(\min ) z=C X \\ \text { s.t. }\left\{\begin{array}{l} A X \leq(=, \geq) b \\ X \geq 0 \end{array}\right. \end{array}\] ## 线性规划的标准化 原因:在求解模型时,需要将数学语言转化为机器语言(任意一条语句都有明确且唯一的意义),这涉及到一个转化的过程,即标准化。 ### 线性规划模型的标准形式 \[\begin{array}{c} \max z=\sum_{j=1}^{\mathrm{n}} c_{\mathrm{j}} x_{j} \\ \text { s.t. }\left\{\begin{array}{l} \sum_{j=1}^{\mathrm{n}} \mathrm{a}_{\mathrm{ij}} \mathrm{x}_{\mathrm{j}} = b_{i}\ (i=1,2, \ldots, m) \\ x_{\mathrm{j}} \geq 0 \qquad\qquad(j=1,2, \ldots, n) \end{array} \right. \end{array}\]
- 目标函数最大(max)
- 约束条件为等式
- 资源限量非负
- 决策向量非负
非标准形式可以转化为标准形式: - min ---> max :取相反数 - 不等式 ---> 等式:加减非负变量 - 决策变量无约束: 转化成两非负向量的差
有关线性规划的假设
比例性
- 假设针对对象:目标函数和约束函数
- 内容:一个活动的贡献值与这个活动级别成比例,或者说方程中不会出现二次及其以上次数的项
可加性
- 对象:模型中的每一个函数
- 内容:就是假设每个函数中不会出现交叉项,或者说不同活动做的贡献不是简单的相加关系
可分性
- 对象:决策变量
- 内容:感觉就是说假设决策变量是实数域上的连续函数
确定性
- 对象:模型参数
- 内容:模型中的参数假设为已知常量
- 注意:实际应用中,确定性假设很少完全满足,使用的参数值可能是将来条件的一种预期,不可避免地带有一定程度的不确定性。 出于这一原因,在假设的参数下确定的最优解被找到后,通常要进行灵敏度分析(sensitivity analysis)。目的之一是识别灵敏度参数(该参数的改变必然导致最优解的变化),因为灵敏度参数值的变化需要立即去改变正在使用的解。
正确地假设(assumption in perspective)
感觉中文译本中这个标题(‘前景假设’)翻译的不好. 这一节是想告诉读者假设有时候并不会全都满足,但是我们可以通过其他的方式进行弥补.如:不满足确定性假设时,我们为此对灵敏度参数进行了灵敏度分析,这就是对不满足假设时的弥补.
当四个假设中某个不满足时,要怎么处理问题.
图解法
图解法可以解决具有两个变量的任何线性规划问题。在增加一些难度的情况下,可以对它进行扩展来解决三个变量但不能多于三个变量的问题(下一章我们将研究用单纯形法解决较大规模的问题)。
运筹学求解软件包
- lingo/lindo
- excel solver
- mpl cplex
2.线性规划几何意义
图解法
(画个表格) 图解法难以解决高维问题。
解的情况
- 唯一
- 无穷多
- 无界解(可行域不封闭、无界)
- 无解(没有可行域)
出现后两者就有可能是数学建模出现了问题,如缺乏必要的约束条件、出现矛盾的约束条件。
3.解的概念
4.单纯形法原理
基本概念
凸集 (通俗版本)集合中任意两点的连线仍在集合中。
(严格定义)设n维度欧式空间中点集\(\mathbb{K}\),\(X_1,X_2\)为集合中任意两点,若对任意实数\(\alpha\in [0,1]\),满足: \[ \alpha X_1+(1-\alpha)X_2\in\mathbb{K} \] 则称该集合\(\mathbb{K}\)为凸集。
凸组合 设n维度欧式空间中点集\(\mathbb{K}\),\(X_1,\cdots,X_k\)为集合中任意\(k\)个点,若存在\(k\)个实数\(0\leq\alpha_i\leq 1,i=1,\cdots,k\)并且\(\sum_{i=1}^{k}\alpha_i =1\),满足: \[ X=\sum_{i=1}^{k}\alpha_i X_i \] 则称\(X\)为\(X_1,\cdots,X_k\)的凸组合。\(0 <\alpha_i< 1,i=1\),称为严格凸组合。
顶点 设\(\mathbb{K}\)凸集,\(X\in\mathbb{K}\),如果\(X\)不能用\(\mathbb{K}\)中不同两点的严格凸组合表示,则称\(X\)为\(\mathbb{K}\)的一个顶点。
也即,对\(0 <\alpha< 1\)有, \[ X\neq \alpha X_1+(1-\alpha)X_2,\forall X_1,X_2\in\mathbb{K},X_1\neq X_2 \] ## 前置定理
定理1(线性规划问题的可行域为凸集) 若线性规划问题存在可行域, \[ D=\{\textbf{X}\vert \sum_{i=1}^{n}\textbf{P}_ix_i=\textbf{b},x_i\geq 0\} \] 是凸集。(小写的x代表\(X\)的分量)
proof 设\(X_1,X_2\)为\(D\)中任意两个相异的点,\(A\)是以\(P_i\)为行向量的矩阵。 则有, \[ AX_1=b,AX_2=b \] 于是,两点连线上任意一点\(X\)满足, \[ \begin{align*} AX=& A(\alpha X_1+(1-\alpha)X_2)\\ =&\alpha AX_1+AX_2-\alpha AX_2\in\mathbb{K}\\ =& \alpha b+b-\alpha b\\ =& b \end{align*} \] 故\(X\in D\),\(D\)凸集。
定理2 若\(\mathbb{K}\)为有界凸集,则集合内任意一点可以表示为\(\mathbb{K}\)的顶点的凸组合。
proof 对于二维的情况比较形象。 已知三角形为有界凸集。任何有界凸集可以用凸多边形逼近,而任意凸多边形可以划分成可数个三角形。承认上诉逻辑,我们只需要证明:三角形的任意一点可以用顶点的凸组合表出。
设\(X_1,X_2,X_3\)为三角形的三个顶点。\(X\)为三角形内任意一点。若\(X\)在三条边上(即落在任意两个顶点的连线上),由凸集定义显然有顶点的凸组合表示。 若不在三条边上,做过\(X\)与\(X_1\)的射线交另外两点的连线于\(X'\),于是有, \[ X'=\alpha X_2+(1-\alpha)X_3 \] \[ X=\lambda X'+(1-\lambda)X_1 \] \[ \lambda,\alpha\in(0,1) \] 代入即得, \[ X=(1-\lambda)X_1+\lambda\alpha X_2+\lambda(1-\alpha)X_3 \] 将三个系数相加不难发现和为\(1\)。 至此,我们得到了\(X\)用顶点的凸组合的表示。
但是对于二维以上的情形,就没有这么直观了,我们需要将三角形换成所谓的“单纯形”。
单纯形是二维的三角形,三维的四面体,在任意维度的推广。n-维单纯形是一个有 n+1 个顶点,n+1 个面 (facet) 的多面体。这个词译自英语 simplex,「单纯」其实意味着基本,因为他是组成更复杂结构(复形 complex)的基本构件。
迭代定理
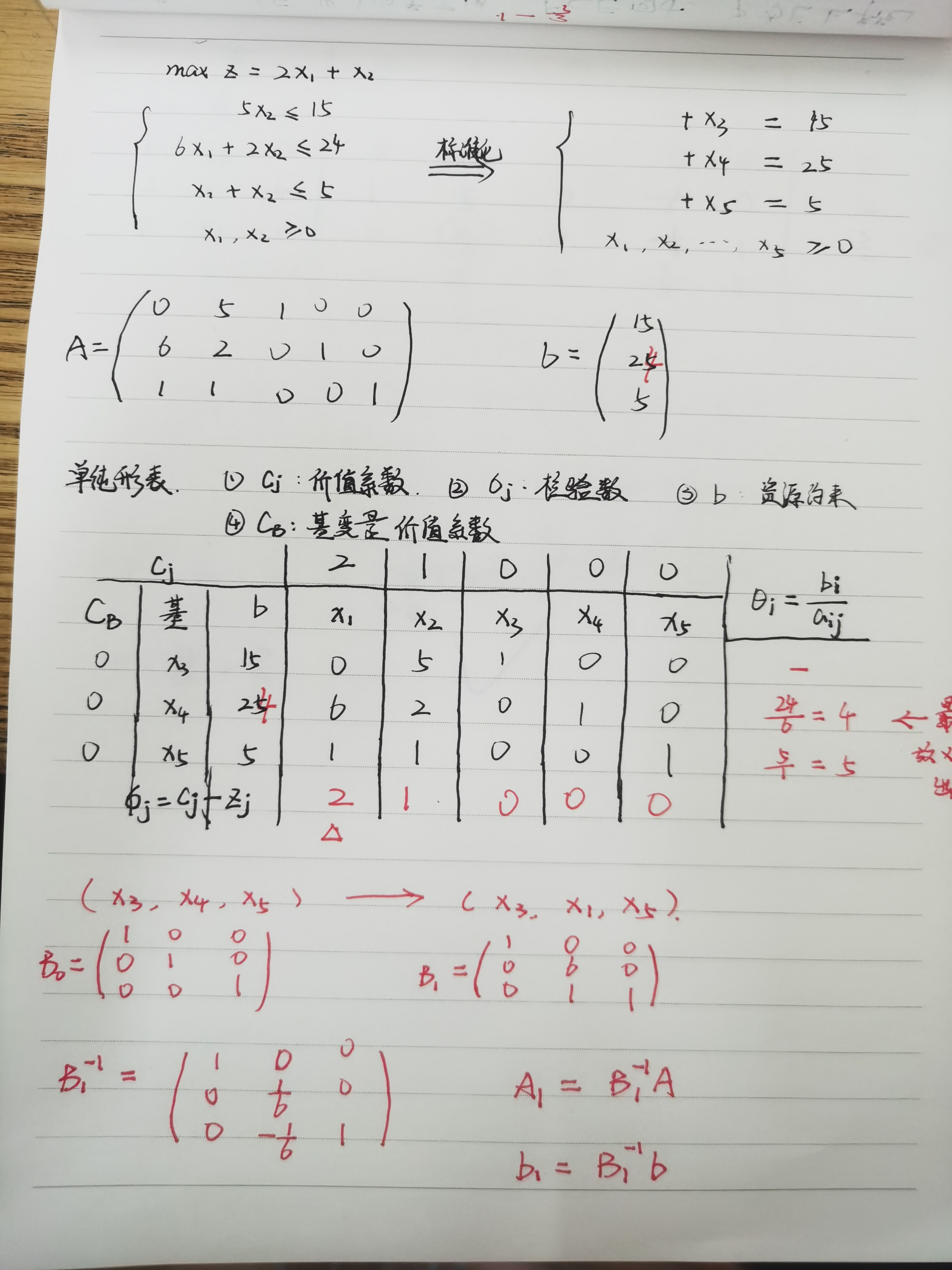
整个迭代过程的基本思想是:先寻找到初始基可行解,然后判断其是否最优、非最优,寻找到单位变动能创造更大收益的非基变量作为入基变量,然后确定入基变量变动后最先因资源受限而降为0的基变量作为出基变量,通过换基得到一个更接近最优值的解,不断重复,直到目标函数取到最优。 # 5.单纯形法的计算步骤 ## 单纯形法的计算步骤 ### 寻找初始基可行解
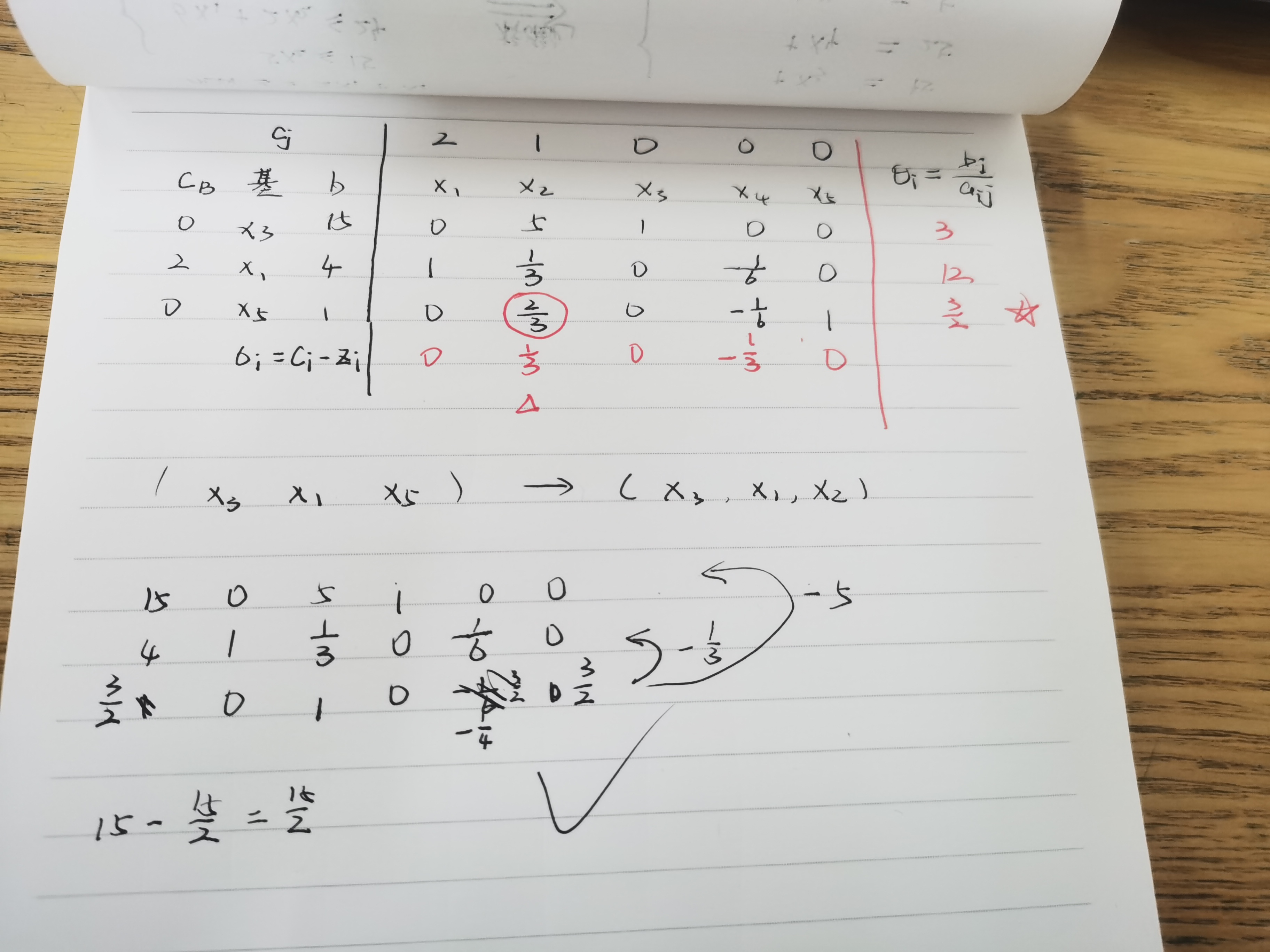
最优性检验&入基变量选取
由迭代原理可知,基变量对应的检验数必为0,非基变量则存在如下几种情况: 1. 所有非基变量的检验数均小于0,代表达到最优,任何变动都会使得目标值往更小的方向变化。 2. 部分非基变量的检验数小于0,其余非基变量的检验数等于0。代表已经达到最优,但存在部分约束,它们的变动并不会导致目标函数值发生变化,即模型存在无穷多最优解。 3. 部分非基变量的检验数大于0,代表现有的生产组合并没有达到最优,存在部分约束,它们的变动能使目标函数值往更大的方向变化,根据单纯形法,选择单位变动使目标函数值变化量最大的变量作为入基变量。
出基变量选取
emmm
 ###
换基&更新单纯形表
###
换基&更新单纯形表
单纯形法的变形
大M法(人工变量法)
考虑如下线性规划问题: \[ \begin{array}{c} \max z=-3 x_{1}+x_{3} \\ \text { s.t. }\left\{\begin{array}{r} x_{1}+x_{2}+x_{3} \leq 4 \\ -2 x_{1}+x_{2}-x_{3} \geq 1 \\ 3 x_{2}+x_{3}=9 \\ x_{1}, x_{2}, x_{3} \geq 0 \end{array}\right. \end{array} \] 化为标准形式: \[ \max z=-3 x_{1}+0 x_{2}+x_{3}+0 x_{4}+0 x_{5} \] \[ \text { s.t. }\left\{\begin{array}{r} x_{1}+x_{2}+x_{3}+x_{4}=4 \\ -2 x_{1}+x_{2}-x_{3}-x_{5}=1 \\ 3 x_{2}+x_{3}=9 \\ x_{1}, x_{2}, x_{3}, x_{4}, x_{5} \geq 0 \end{array}\right. \] 有时我们并不能很方便地找出一组基来,为了更好地找到初始基,我们需要引入人工变量来构造一组基。 \[ \mathbf{A}=\left(\begin{array}{ccccc} 1 & 1 & 1 & 1 & 0 \\ -2 & 1 & -1 & 0 & -1 \\ 0 & 3 & 1 & 0 & 0 \end{array}\right), \quad \mathbf{b}=\left(\begin{array}{l} 4 \\ 1 \\ 9 \end{array}\right) \] 人工变量法的目的是为了构造一组基,原模型中只有一个单位列向量,但基的秩为 3 ,即应找到三个单位列向量, 由此我们引入人工变量 \(x_{6}\) 和 \(x_{7}\) 。 由于这是我们人工引入 (实际上并不存在的产品),我们需要控制它最终的值只能为 0 ,所以在目标函数中,它的价值系数为 \(-M\) (其中 \(M\) 是个足够大的数,并假设其能参与运算),代表它每生产一件,都会导致目标函数变得足够小,由此,新的模型标准式为: \[ \begin{array}{c} \max z=-3 x_{1}+0 x_{2}+x_{3}+0 x_{4}+0 x_{5}-M x_{6}-M x_{7} \\ \text { s.t. }\left\{\begin{array}{c} x_{1}+x_{2}+x_{3}+x_{4}=4 \\ -2 x_{1}+x_{2}-x_{3}-x_{5}+x_{6}=1 \\ 3 x_{2}+x_{3}+x_{7}=9 \\ x_{j} \geq 0(j=1,2, \ldots, 7) \end{array}\right. \end{array} \]
由于人工变量是我们构建的,实际并不存在,所以要求它最终取值为0,若是单纯形表迭代到所有非基变量检验数均小于0,但基变量中含非0的人工变量时,说明该线性规划问题无解。
两阶段法
模型求解的过程一般都靠计算机完成,需要将数学语言转化为含义明确唯一的程序语言,使用人工变量法虽然可以帮助寻找初始基,但M这个足够大的数含义并非明确,在不同问题中,“足够”有不同的衡量标准,为此我们引入两阶段法。其基本思路是将添加人工变量后的线性规划问题拆分成两个阶段:
- 第一阶段:求解一个目标函数只包含人工变量的线性规划问题,在决策变量非负的约束条件下,人工变量只有取0才能取到最小值,此时的最优解即原问题的一个基可行解。
- 第二阶段:回归原问题,并用第一阶段最后的基为初始基,对原问题用单纯形法迭代。
还是以上一道题为例 \[ \max z=-3 x_{1}+0 x_{2}+x_{3}+0 x_{4}+0 x_{5} \] \[ \text { s.t. }\left\{\begin{array}{r} x_{1}+x_{2}+x_{3}+x_{4}=4 \\ -2 x_{1}+x_{2}-x_{3}-x_{5}=1 \\ 3 x_{2}+x_{3}=9 \\ x_{1}, x_{2}, x_{3}, x_{4}, x_{5} \geq 0 \end{array}\right. \] 第一阶段: 加入人工变量 \(x_{6}\) 和 \(x_{7}\) ,构建目标函数只包含人工变量的模型: \[ \max z= 0 x_{1}+0 x_{2}+0 x_{3}+0 x_{4}+0 x_{5}-x_{6}-x_{7} \] \[ \text { s.t. }\left\{\begin{array}{r} x_{1}+x_{2}+x_{3}+x_{4}=4 \\ -2 x_{1}+x_{2}-x_{3}-x_{5}=1 \\ 3 x_{2}+x_{3}=9 \\ x_{1}, x_{2}, x_{3}, x_{4}, x_{5} \geq 0 \end{array}\right. \]
第二阶段: 第一阶段最后的基为初始基,对原问题用单纯形法迭代。
若第一阶段迭代最终结果中的基变量仍含有非0的人工变量,即目标函数值不为0,则说明问题无解。
单纯形法的其他讨论
一些可能出现的情况
目标函数极小值时解的最优性判别 根据单纯形法的迭代原理,在目标函数取极小值时,只需确保所有检验数大于0即可保证最优。
退化 按最大检验数和最小比值\(\theta\)确定入基变量和出基变量时,有时会存在两个及以上相同的最大或最小值,从而使得下个表中的基可行解中出现一个或多个基变量等于0的退化解(模型中存在多余约束,使得多个基可行解对应同一顶点),进而可能导致迭代计算陷入循环,为避免重复的运算,规定:存在多个检验数大于0取得相同最大值时,始终取下标值最小(或最大)的变量作为入基变量;存在多个\(\theta\)出现相同最小比值,始终取下标值最小(或最大)的变量作为出基变量。
无可行解的判别 从人工变量法和两阶段法的计算步骤中可以看出,当求解结果出现所有检验数均小于等于0,但基变量中仍存在非零的人工变量(两阶段法第一阶段目标函数值不为0)时,表明问题无可行解,即人工变量最终求解结果必须为0.
修正单纯形法 (求解过程的优化)
单纯形法的矩阵描述
主要是对换基过程的优化,把求逆过程优化,直接在单纯形表上操作。不严格地说,其实就是把求逆换成初等行变换。
emmm